หัวข้อ
- Vector dot product
- Vector and orthogonality
- Vector cross product
- Projection
- Collinear
- Part I
Vector dot product [1,2]
dot product บางครั้งเรียกว่า scalar product หรือ Euclidean inner product เป็นวิธีการคูณ vector เข้าด้วยกัน แล้วผลลัพธ์จะออกมาเป็น scalar ถ้ามี \(\vec{v}=\begin{bmatrix} v_1\\v_2\\v_3\\ \vdots \\v_n \end{bmatrix},\vec{u} =\begin{bmatrix} u_1\\u_2\\u_3\\ \vdots \\u_n \end{bmatrix} \in \Re^n \) แล้ว dot product ระหว่าง \( \vec{v}, \vec{u}\) คือ
\[
\begin{equation*}
\vec{v} \cdot \vec{u} = \begin{cases}
\|\vec{v} \| \cdot \| \vec{u} \| \cdot cos (\theta) &\text{ when } \vec{u} \neq 0 \text{ and } \vec{u} \neq 0 \\\\
0 &\text{ when } \vec{u} = 0 \text{ or } \vec{u} = 0
\end{cases}
\end{equation*}
\tag{1.0}\
\]
เมื่อ \( \theta \) คือมุมระหว่าง \( \vec{v}, \vec{u}\) หรือ
\[ \vec{v} \cdot \vec{u} = \sum_{i=1}^n v_i u_i \tag{1.1} \]
ตัวอย่าง : มี \(\vec{u}, \vec{v}\) โดย \( \|\vec{u} \| = 4 , \|\vec{v} \| = 5 \) และ vector ทั้งสองทำมุมต่อกัน \( \frac{\pi}{4} \) หาค่าของ dot product ได้ดังนี้
\[
\begin{align*}
\vec{u} \cdot \vec{v} &= \|\vec{v} \| \cdot \| \vec{u} \| \cdot cos (\theta) \\
\vec{u} \cdot \vec{v} &= 5 \times 4 \times cos (\frac{\pi}{4}) \\
&= 14.14
\end{align*}
\]
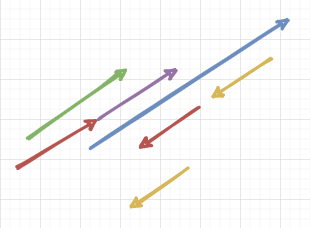
จาก (1.0) จะเห็นว่าค่าของมุมระหว่าง \(\vec{u}, \vec{v} \) ส่งผลต่อค่าของ \(\vec{u} \cdot \vec{v} \) เมื่อ \( \vec{u} \perp \vec{v} \) ค่าของ \( \vec{u} \cdot \vec{v} = 0 \) เพราะ \( cos(\frac{\pi}{2}) = 0\) (รูปที่ 1 (a),(b))ในขณะที่ \(\vec{u} \cdot \vec{v} = \pm \|\vec{u} \|\|\vec{u} \| \) เมื่อ \( \vec{u} \| \vec{v} \) (รูปที่ 1 (c),(d))
 |
| รูปที่ 1 |
คุณสมบัติของ dot product
ถ้า \(\vec{v} , \vec{u},\vec{w} \in \Re^n \) และ \( a \in \Re \) แล้ว
1. \( \vec{v} \cdot \vec{u} = \vec{u} \cdot \vec{v}\)
2. \( (\vec{v} +\vec{u}) \cdot \vec{w} = \vec{v} \cdot \vec{w} + \vec{u} \cdot \vec{w}\)
3. \( a (\vec{v} \cdot \vec{u}) = a\vec{v} \cdot \vec{u} = \vec{v} \cdot a\vec{u} \)
4. \(\vec{u}\cdot\vec{u} \geq 0 \)
Inner product คือ general concept ของ dot product (dot product คือรูปแบบหนึ่งของ inner product) เขียนแทนด้วย \(\langle u,v\rangle\)
ถ้ามี V เป็น set ของ vector แล้ว inner product คือ function ที่รับ input เป็น คู่ของ vector จาก V (\(\vec{v},\vec{u} \in V \)) โดยมีคุณสมบัติ
1. \( \langle \vec{u},\vec{u} \rangle \geq 0, \forall \vec{u} \in V \)
2. \( \langle \vec{u},\vec{u}\rangle = 0, \vec{u} = \vec{0} \)
3. \( \langle \vec{u}+\vec{v},\vec{w}\rangle = \langle \vec{u}+\vec{w} \rangle + \langle \vec{v},\vec{w}\rangle \)
4. \( \langle a \vec{u},\vec{v} \rangle = a \langle \vec{u},\vec{v} \rangle, a \in \Re \)
5. \( \langle a \vec{u},\vec{v} \rangle = \langle a \vec{v},\vec{u} \rangle \)
[top]
Vector angle และ orthogonality [3]
จากเรื่อง dot product มีการกล่าวถึงมุมระหว่าง vector ไว้ \( \vec{u},\vec{v} \in \Re^n\) จะทำมุมตั้งฉากต่อกัน (orthogonal, perpendicular vectors) ก็ต่อเมื่อ \( \vec{u} \cdot \vec{v} = 0 \) เขียนแทนด้วย \( \vec{u} \perp \vec{v} \)
ตัวอย่าง : \( \vec{u} = [2,1], \vec{v} = [1,-2] \) จงแสดงว่า \( \vec{u} \perp \vec{v} \)
\[
\begin{align*}
\vec{u} \cdot \vec{v} &= (2 \times 1) + (1 \times -2) \\
&= 2 -2 \\
&= 0 \\
\end{align*}\]
เมื่อ \(\vec{u} \cdot \vec{v} = 0 \) จึงสรุปว่า \( \vec{u} \perp \vec{v} \)
ค่าของ cosine ของมุมระหว่าง vector ใช้วัดค่าความเหมือน (similarity) ระหว่าง 2 vectors ได้ เรียกว่า cosine similarity [4] เราทราบว่า \( cos (\theta) \) มีค่าระหว่าง [-1,1] จากรูปที่ 4 แสดงให้เห็นว่า cosine similarity จะมีค่ามากขึ้น เมื่อ cosine ให้ค่าเข้าใกล้ 1 และลดลงเมื่อ cosine ให้ค่าเข้าใกล้ -1
 |
| รูปที่ 2 |
จาก (1.0) :
\[
\begin{align*}
\vec{u} \cdot \vec{v} &= \|\vec{u}\| \|\vec{v}\| cos (\theta) \\
cos( \theta) &= \frac{\vec{u} \cdot \vec{v}}{\|\vec{u}\| \|\vec{v}\|} \\ \\
cos( \theta) &= \frac{\sum_{i=1}^n u_iv_i}{\|\vec{u}\| \|\vec{v}\|} \tag{2.0}\\\\
\therefore \theta &= cos^{-1}(\frac{\sum_{i=1}^n u_iv_i}{\|\vec{u}\| \|\vec{v}\|}) \tag{2.1}
\\
\end{align*}
\]
ตัวอย่าง : หามุมระหว่าง \(\vec{a}=\begin{bmatrix}3\\4 \end{bmatrix} , \vec{b} = \begin{bmatrix}4\\3\end{bmatrix}\)
คำนวนณ \( \vec{a} \cdot \vec{b} \) \[
\begin{align*}
\begin{bmatrix}3\\4 \end{bmatrix} \cdot \begin{bmatrix}4\\3\end{bmatrix} &= (3 \times 4) + (4 \times 3) \\\\
&= 12 + 12 = 24
\end{align*}
\]
หา \( \|\vec{a} \|, \|\vec{b}\| \) \[
\begin{align*}
\| \vec{a} \| &= \sqrt{3^2 + 4^2} = 5 \\\\
\| \vec{b} \| &= \sqrt{4^2 + 3^2} = 5 \\\\
\end{align*}
\]
หาค่า \(cos(\theta) \) \[
\begin{align*}
cos(\theta) &= \frac{\vec{a} \cdot \vec{b}}{\|\vec{a} \|, \|\vec{b}\|} \\
&= \frac{24}{5 \times 5}\\
&= 0.96\\
\therefore \theta &= cos^{-1}(0.96)\\ \end{align*}
\]
ย้อนกลับไปเรื่อง linear dependence ที่ได้ทิ้งข้อสังเกตุเรื่อง redundant information และเรื่องของทิศทางของ vector เมื่อกลับมาเทียบกับค่า similarity ที่วัดจากด้วยค่าของ cosine แล้วจะเห็นสอดคล้องกัน vector ที่มี linearly dependent จะให้ค่า cosine ที่ค่อนไปทาง 1 (vector มีทิศทางเดียวกัน) ในขณะที่ linearly independent จะค่อนไปทาง -1 (vector มีทิศทางตรงข้ามกัน) และ cosine ที่ให้ค่าเป็น 0 (vector ตั้งฉากกัน) จะนับเป็นจุดที่เริ่มต้นของการเปลี่ยนจาก linearly dependent ไปยัง linearly independent
[top]
Vector cross product [6]
Vector cross product (เรียกย่อว่า cross product) คือรูปแบบหนึ่งของ vector multiplication ต่างจาก vector dot product ตรงที่ผลลัพธ์ของ cross product คือ vector ในขณะที่ dot product ให้ผลลัพธ์เป็น scalar โดย vector ผลลัพธ์ที่ได้จะตั้งฉากกับ vector ที่นำมาทำ cross product ต่อกัน เขียนแทนด้วย \( \vec{u} \times \vec{v} \) นิยามคือ
\[ \vec{u} \times \vec{v} = \|\vec{u} \|\|\vec{v} \| sin(\theta) \vec{n} \tag{3.0} \]
เมื่อ \(\vec{n} \) คือ unit vector ของแกนที่ตั้งฉากกับ \( \vec{u},\vec{v} \)
 |
| รูปที่ 3 |
รูปที่ 3 แสดงทิศทางของ \(\vec{w} = \vec{u} \times \vec{v} \) ที่ทำมุมตั้งฉากทั้ง \( \vec{u} \) และ \(\vec{v} \) ซึ่งมีทางเป็นไปได้มากกว่า 1 ทิศทาง (ในรูปแสดงไว้เพียง 2) การที่จะทราบทิศทางของ \( \vec{w} \) ใช้เทคนิคที่เรียกว่า right-hand rule (รูปที่ 4) เมื่อกำหนดให้ "นิ้วชี้" ชี้ไปทิศทางเดียวกับ vector ที่ 1 และ "นิ้วกลาง" ชี้ไปทิศเดียวกับ vector ที่ 2 แล้ว "นิ้วโป้ง" จะแสดงทิศทางของ vector cross product ที่ได้
ถ้าเราสังเกตุดู right-hand rule จะเห็นว่ามีการใช้นิ้วมือเพียง 3 นิ้ว แสดงว่า cross product ถูก defined ไว้กับ vector 3 มิติ เท่านั้น (ที่จริงมีการ defined ไว้ที่ 3 มิติกับ 7 มิติ) และในการคำนวณโดยใช้ตาม (3.0) จะพบความยุ่งยากเมื่อ vector ไม่ได้ขนานกับ axis จึงนิยมใช้การคำนวณโดยใช้ Rule of Sarrus แทน [8]
\[
\begin{bmatrix} u_1\\u_2\\u_3\end{bmatrix} \times \begin{bmatrix} v_1\\v_2\\v_3\end{bmatrix} = \begin{bmatrix} u_2 v_3 - u_3 v_2 \\ u_3 v_1 -u_1 v_3 \\u_1 v_2 -u_2 v_1 \end{bmatrix} \tag{3.1}
\]
ตัวอย่าง : \(\vec{a}=\begin{bmatrix}1\\2\\3 \end{bmatrix},\vec{b} = \begin{bmatrix}2\\1\\-2 \end{bmatrix} \) จงหา \( \vec{a} \times \vec{b}\)
ใช้ Rule of Sarrus
\[\begin{align*}
\vec{a} \times \vec{b} &= \begin{bmatrix}(2 \times -2) - (3 \times 1) \\(3 \times 2) - (1 \times -2) \\ (1 \times 1) - (2 \times 2) \end{bmatrix}\\\\
&= \begin{bmatrix}-7 \\8 \\ -3 \end{bmatrix}
\end{align*}
\]
Projection
 |
| รูปที่ 5 |
จากรูปที่ 5 b คือส่วนที่อยู่บนเส้น L หากเราทราบค่าของ c ก็จะสามารถหาความยาวของ b หาได้คือ \( c \times cos(\theta)\) รูปแบบความสัมพันธ์นี้เรียกว่า b คือ projection ของ c บน L
 |
| รูปที่ 6 |
ทำนองเดียวกัน หากพิจารณาในรูปแบบของ vector แทนส่วนของเส้นตรง ตามรูปที่ 6 \( \vec{w} \) คือ projection ของ \( \vec{u}\) บน \( \vec{v}\) เขียนแทนด้วย \( \text{proj}_v \vec{u} = \vec{w} \) ซึ่งเห็นชัดเจนว่า \[ \vec{w} = \alpha \vec{v} \tag{4.0}\]
เมื่อ \( \alpha \) เป็น scalar
 |
| รูปที่ 7 |
ในรูปที่ 7 ได้วาด vector สีม่วงขึ้นมา เป็น vector ที่ได้จาก \( \vec{u} - \vec{w}\) และ vector นี้ตั้งฉากกับ \( \vec{v}\) ดังนั้น
\[
\begin{align*}
\vec{v} \cdot (\vec{u} - \vec{w}) &= 0\\
\vec{v} \cdot \vec{u} - \vec{v} \cdot \vec{w} &= 0 \\
\vec{v} \cdot \vec{u} &= \vec{v} \cdot \vec{w} \\
\vec{v} \cdot \vec{u} &= \vec{v} \cdot \alpha\vec{v} \\
\frac{\vec{v} \cdot \vec{u}}{\vec{v} \cdot \vec{v}} &= \alpha \tag{4.1} \\
\end{align*}
\]
นำ \( \alpha \) ไปแทนใน (4.0) จะได้
\[ \text{proj}_v \vec{u} = \frac{\vec{v} \cdot \vec{u}}{\vec{v} \cdot \vec{v}} \vec{v} \tag{4.2}\]
ตัวอย่าง : หา projection ของ \(\vec{u} = \begin{bmatrix} 1\\4\\0\end{bmatrix} \) บน \(\vec{v} = \begin{bmatrix} 4\\2\\4\end{bmatrix} \)
\[
\begin{align*}
\text{proj}_v u &= \frac{\vec{v} \cdot \vec{u}}{\vec{v} \cdot \vec{v}} \vec{v} \\\\
&= \frac{\begin{bmatrix} 4\\2\\4\end{bmatrix} \cdot \begin{bmatrix} 1\\4\\0\end{bmatrix} }{\begin{bmatrix} 4\\2\\4\end{bmatrix} \cdot \begin{bmatrix} 4\\2\\4\end{bmatrix}} \begin{bmatrix} 4\\2\\4\end{bmatrix} \\\\
&= \frac{12}{36} \begin{bmatrix} 4\\2\\4\end{bmatrix} \\
&=\frac{1}{3}\begin{bmatrix} 4\\2\\4\end{bmatrix}
\end{align*}
\]
ตัวอย่าง : ถ้าจุด \(P(1,2), Q(4,6)\) เป็น 2 จุดบนเส้นตรง L และมี \(\vec{v} = \begin{bmatrix} v_1 \\ v_2 \end{bmatrix}\) จงหา \( \text{proj}_L \vec{v} \)
เราสามารถสร้าง vector จากจุด P,Q ที่กำหนดให้ได้คือ \[ \vec{u} = \begin{bmatrix} 4-1 \\ 6-2 \end{bmatrix} =\begin{bmatrix} 3 \\ 4 \end{bmatrix} \] โดย \( \vec{u} \) จะขนานไปกับเส้นตรง L ดังนั้น \( \text{proj}_L \vec{v} \) จึงหาได้จาก \(\text{proj}_{\vec{u}} \vec{v} \) เช่นกัน
\[
\begin{align*}
\text{proj}_{\vec{u}} \vec{v} &= \frac{\vec{u} \cdot \vec{v}}{\vec{u} \cdot \vec{u}} \vec{u} \\\\
&= \frac{\begin{bmatrix} 3 \\ 4 \end{bmatrix} \cdot \begin{bmatrix} v_1 \\ v_2 \end{bmatrix}} {\begin{bmatrix} 3 \\ 4 \end{bmatrix} \cdot \begin{bmatrix} 3 \\ 4 \end{bmatrix}}\begin{bmatrix} 3 \\ 4 \end{bmatrix} \\\\
&=\frac{3v_1+4v_2}{25}\begin{bmatrix} 3 \\ 4 \end{bmatrix}\\
\end{align*}
\]





{kind=link}




ความคิดเห็น
แสดงความคิดเห็น